This example sheet describes how to estimate dislocation densities following the reference paper
Lets start by importing orientation data from 2 percent uniaxial deformed steel DC06 and visualize those data in an ipf map.
% import the EBSD data
ebsd = EBSD.load([mtexDataPath filesep 'EBSD' filesep 'DC06_2uniax.ang'],'setting',2);
ebsd.how2plot = plottingConvention(zvector,-yvector);
% define the color key
ipfKey = ipfHSVKey(ebsd);
ipfKey.inversePoleFigureDirection = yvector;
% and plot the orientation data
plot(ebsd,ipfKey.orientation2color(ebsd.orientations),'micronBar','off','figSize','medium')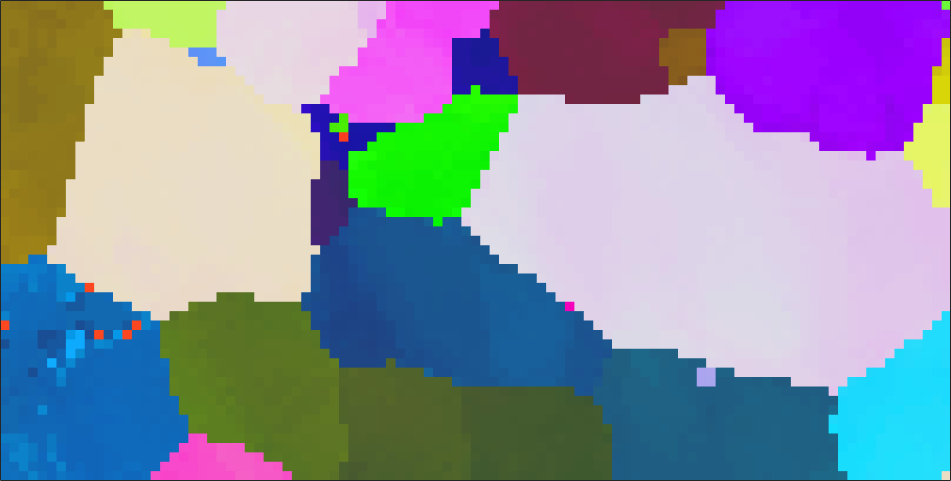
In the next step we reconstruct grains, remove all grains with less then 5 pixels and smooth the grain boundaries.
% reconstruct grains
[grains,ebsd.grainId] = calcGrains(ebsd,'angle',2.5*degree,'minPixel',6);
% smooth grain boundaries
grains = smooth(grains,5);
hold on
plot(grains.boundary,'linewidth',2)
hold off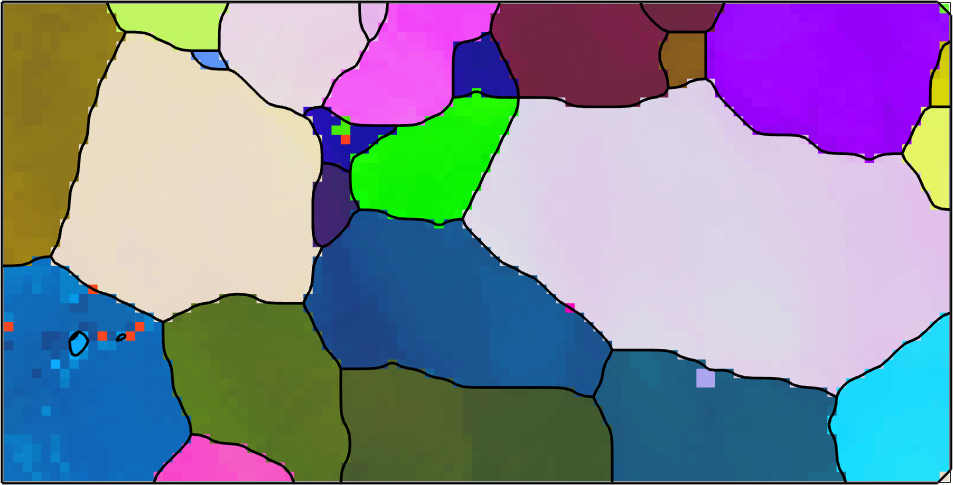
Data cleaning
The computation of geometrically necessary dislocations from EBSD maps depends on local orientation changes in the map. In order to make those visible we switch to a different color key that colorizes the misorientation of an pixel with respect to the grain meanorientation.
% a key the colorizes according to misorientation angle and axis
ipfKey = axisAngleColorKey(ebsd);
% set the grain mean orientations as reference orientations
ipfKey.oriRef = grains(ebsd('indexed').grainId).meanOrientation;
% plot the data
plot(ebsd('indexed'),ipfKey.orientation2color(ebsd('indexed').orientations),'micronBar','off','figSize','medium')
hold on
plot(grains.boundary,'linewidth',2)
hold off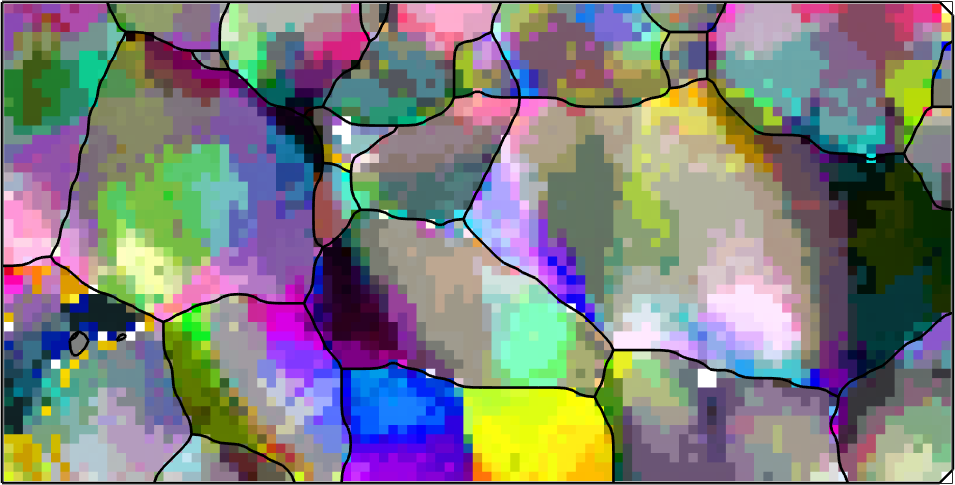
We observe that the data are quite noisy. As noisy orientation data lead to overestimating the GND density we first have to denoise the orientation data.
% define the denoising filter
F = halfQuadraticFilter;
ebsd = smooth(ebsd('indexed'),F,'fill',grains);
% plot the denoised data
ipfKey.oriRef = grains(ebsd('indexed').grainId).meanOrientation;
plot(ebsd('indexed'),ipfKey.orientation2color(ebsd('indexed').orientations),'micronBar','off','figSize','medium')
hold on
plot(grains.boundary,'linewidth',2)
hold off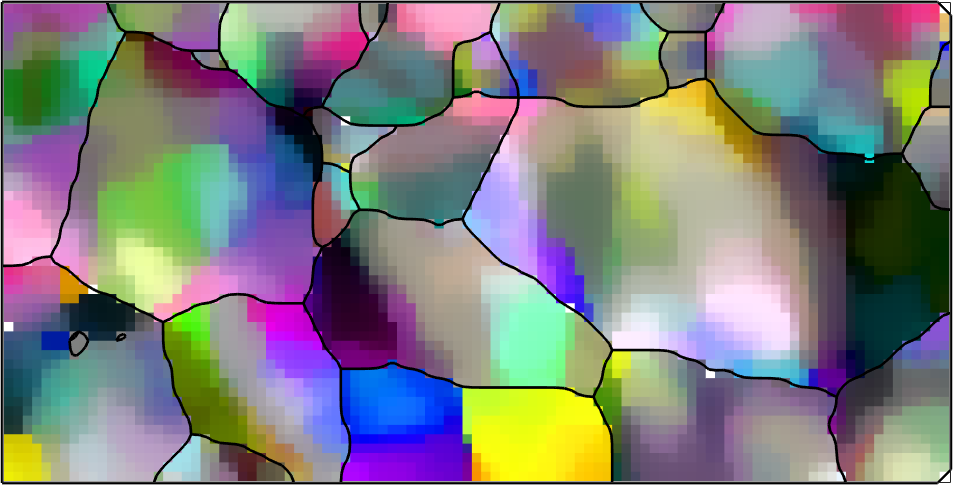
The incomplete curvature tensor
Starting point of any GND computation is the curvature tensor, which is a rank two tensor that is defined for every pixel in the EBSD map by the directional derivatives in x, y and z direction.
% consider only the Fe(alpha) phase
ebsd = ebsd('indexed').gridify;
% compute the curvature tensor
kappa = ebsd.curvature
% one can index the curvature tensors in the same way as the EBSD data.
% E.g. the curvature in pixel (2,3) is
kappa(2,3)kappa = curvatureTensor (y↑→x)
size: 101 x 51
unit: 1/um
rank: 2 (3 x 3)
ans = curvatureTensor (y↑→x)
unit: 1/um
rank: 2 (3 x 3)
*10^-4
4.591 -2.269 NaN
-0.379 -15.305 NaN
11.952 -17.293 NaNThe components of the curvature tensor
As expected the curvature tensor is NaN in the third column as this column corresponds to the directional derivative in z-direction which is usually unknown for 2d-EBSD maps.
We can access the different components of the curvature tensor with
kappa12 = kappa{1,2};
size(kappa12)ans =
101 51which results in a variable of the same size as our EBSD map. This allows us to visualize the different components of the curvature tensor
newMtexFigure('nrows',3,'ncols',3);
% cycle through all components of the tensor
for i = 1:3
for j = 1:3
nextAxis(i,j)
plot(ebsd,kappa{i,j},'micronBar','off')
hold on; plot(grains.boundary,'linewidth',2); hold off
end
end
% unify the color rage - you may also use setColoRange equal
setColorRange([-0.005,0.005])
drawNow(gcm,'figSize','large')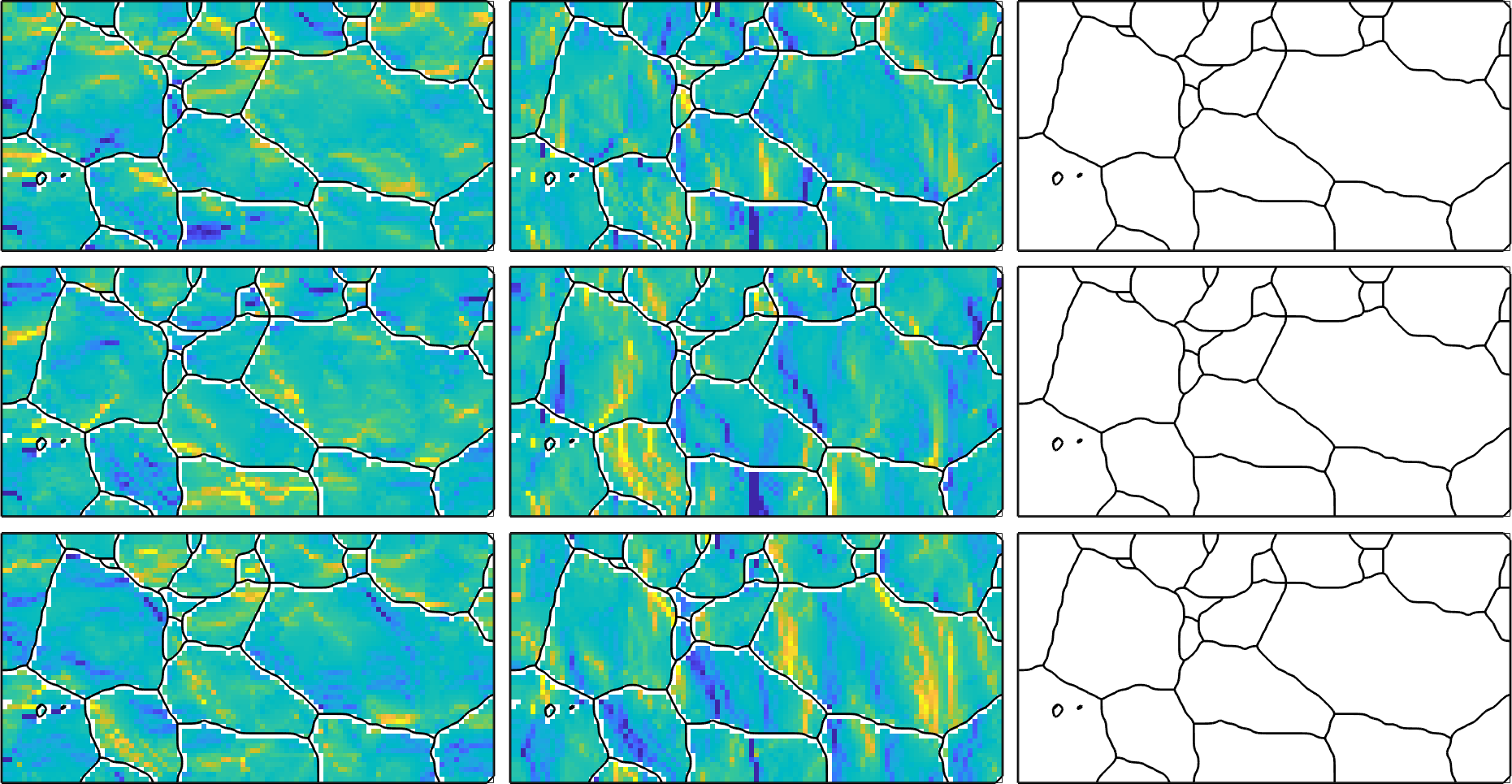
The incomplete dislocation density tensor
According to Kroener the curvature tensor is directly related to the dislocation density tensor.
alpha = kappa.dislocationDensityalpha = dislocationDensityTensor (y↑→x)
size: 101 x 51
unit: 1/um
rank: 2 (3 x 3)which has the same unit as the curvature tensor and is incomplete as well as we can see when looking at a particular one.
alpha(2,3)ans = dislocationDensityTensor (y↑→x)
unit: 1/um
rank: 2 (3 x 3)
*10^-4
NaN -0.379 11.952
-2.269 NaN -17.293
NaN NaN 10.715Crystallographic Dislocations
The central idea of Pantleon is that the dislocation density tensor is build up by single dislocations with different densities such that the total energy is minimum. Depending on the atomic lattice different dislocation systems have to be considered. In present case of a body centered cubic (bcc) material 48 edge dislocations and 4 screw dislocations have to be considered. Those principle dislocations are defined in MTEX either by their Burgers and line vectors or by
dS = dislocationSystem.bcc(ebsd.CS)dS = dislocationSystem
mineral: Iron (Alpha) (432)
edge dislocations : 48 x 1
Burgers vector line vector energy length
[1 -1 1] [-2 -1 1] 2 2.49
[1 1 -1] [2 -1 1] 2 2.49
[1 1 -1] [1 -2 -1] 2 2.49
[-1 1 1] [1 2 -1] 2 2.49
[1 -1 1] [-1 1 2] 2 2.49
[-1 1 1] [-1 1 -2] 2 2.49
[1 -1 1] [1 2 1] 2 2.49
[1 1 1] [-1 2 -1] 2 2.49
[1 1 -1] [1 1 2] 2 2.49
[1 1 1] [-1 -1 2] 2 2.49
[-1 1 1] [2 1 1] 2 2.49
[1 1 1] [2 -1 -1] 2 2.49
[-1 1 1] [0 1 -1] 2 2.49
[1 -1 1] [-1 0 1] 2 2.49
[1 1 -1] [1 -1 0] 2 2.49
[-1 1 1] [-1 0 -1] 2 2.49
[1 -1 1] [-1 -1 0] 2 2.49
[1 1 -1] [0 -1 -1] 2 2.49
[1 1 -1] [1 0 1] 2 2.49
[-1 1 1] [1 1 0] 2 2.49
[1 -1 1] [0 1 1] 2 2.49
[-1 -1 -1] [0 -1 1] 2 2.49
[-1 -1 -1] [1 0 -1] 2 2.49
[-1 -1 -1] [-1 1 0] 2 2.49
[-1 1 1] [-1 4 -5] 2 2.49
[1 -1 1] [-5 -1 4] 2 2.49
[1 1 -1] [4 -5 -1] 2 2.49
[-1 1 1] [-4 1 -5] 2 2.49
[1 -1 1] [-5 -4 1] 2 2.49
[1 1 -1] [1 -5 -4] 2 2.49
[1 1 -1] [4 1 5] 2 2.49
[-1 1 1] [5 4 1] 2 2.49
[1 -1 1] [1 5 4] 2 2.49
[-1 -1 -1] [-1 -4 5] 2 2.49
[-1 -1 -1] [5 -1 -4] 2 2.49
[-1 -1 -1] [-4 5 -1] 2 2.49
[1 -1 1] [1 -4 -5] 2 2.49
[1 1 -1] [-5 1 -4] 2 2.49
[-1 1 1] [-4 -5 1] 2 2.49
[1 -1 1] [4 -1 -5] 2 2.49
[1 1 -1] [-5 4 -1] 2 2.49
[-1 1 1] [-1 -5 4] 2 2.49
[-1 -1 -1] [-4 -1 5] 2 2.49
[-1 -1 -1] [5 -4 -1] 2 2.49
[-1 -1 -1] [-1 5 -4] 2 2.49
[1 1 -1] [1 4 5] 2 2.49
[-1 1 1] [5 1 4] 2 2.49
[1 -1 1] [4 5 1] 2 2.49
screw dislocations: 4 x 1
Burgers vector energy length
[-1 -1 -1] 1 2.49
[1 -1 1] 1 2.49
[-1 1 1] 1 2.49
[1 1 -1] 1 2.49Here the norm of the Burgers vectors is important
% size of the unit cell
a = norm(ebsd.CS.aAxis);
% in bcc and fcc the norm of the burgers vector is sqrt(3)/2 * a
[norm(dS(1).b), norm(dS(end).b), sqrt(3)/2 * a]ans =
2.4855 2.4855 2.4855The Energy of Dislocations
The energy of each dislocation system can be stored in the property u. By default this value it set to 1 but should be changed accoring to the specific model and the specific material.
According to Hull & Bacon the energy U of edge and screw dislocations is given by the formulae
\[ U_{\mathrm{screw}} = \frac{Gb^2}{4\pi} \ln \frac{R}{r_0} \]
\[ U_{\mathrm{edge}} = \frac{1}{(1-\nu)} U_{\mathrm{screw}} \]
where
-
Gis the shear modulus -
bis the length of the Burgers vector -
nuis the Poisson ratio -
R -
r
In this example we assume \[ U_{\mathrm{edge}} = 1 \] \[ U_{\mathrm{screw}} = 1-\nu \]
nu = 0.3;
% energy of the edge dislocations
dS(dS.isEdge).u = 1;
% energy of the screw dislocations
dS(dS.isScrew).u = 1 - 0.3;Question to everybody: what is the best way to set the energy? I found different formulas
E = 1 - poisson ratio E = c * G * |b|^2, - G - Schubmodul / Shear Modulus Energy per (unit length)^2
A single dislocation causes a deformation that can be represented by the rank one tensor
dS(1).tensorans = dislocationDensityTensor (Iron (Alpha))
unit: au
rank: 2 (3 x 3)
-1.1717 -0.5858 0.5858
1.1717 0.5858 -0.5858
-1.1717 -0.5858 0.5858Note that the unit of this tensors is the same as the unit used for describing the length of the unit cell, which is in most cases Angstrom (au). Furthermore, we observe that the tensor is given with respect to the crystal reference frame while the dislocation density tensors are given with respect to the specimen reference frame. Hence, to make them compatible we have to rotate the dislocation tensors into the specimen reference frame as well. This is done by
dSRot = ebsd.orientations * dSdSRot = dislocationSystem
edge dislocations : 5144 x 48
screw dislocations: 5144 x 4Fitting Dislocations to the incomplete dislocation density tensor
Now we are ready for fitting the dislocation tensors to the dislocation density tensor in each pixel of the map. This is done by the command fitDislocationSystems.
[rho,factor] = fitDislocationSystems(kappa,dSRot);As result we obtain a matrix of densities rho such that the product with the dislocation systems yields the incomplete dislocation density tensors derived from the curvature, i.e.,
% the restored dislocation density tensors
alpha = sum(dSRot.tensor .* rho,2);
% we have to set the unit manually since it is not stored in rho
alpha.opt.unit = '1/um';
% the restored dislocation density tensor for pixel 2
alpha(2)
% the dislocation density derived from the curvature in pixel 2
kappa(2).dislocationDensityans = dislocationDensityTensor (y↑→x)
unit: 1/um
rank: 2 (3 x 3)
*10^-5
9.34 21.9 33.18
-12.99 -34.91 -32.27
5.49 -20.93 39.54
ans = dislocationDensityTensor (y↑→x)
unit: 1/um
rank: 2 (3 x 3)
*10^-5
NaN 21.9 33.18
-12.99 NaN -32.27
NaN NaN 39.54we may also restore the complete curvature tensor with
kappa = alpha.curvaturekappa = curvatureTensor (y↑→x)
size: 5151 x 1
unit: 1/um
rank: 2 (3 x 3)and plot it as we did before
newMtexFigure('nrows',3,'ncols',3);
% cycle through all components of the tensor
for i = 1:3
for j = 1:3
nextAxis(i,j)
plot(ebsd,kappa{i,j},'micronBar','off')
hold on; plot(grains.boundary,'linewidth',2); hold off
end
end
setColorRange([-0.005,0.005])
drawNow(gcm,'figSize','large');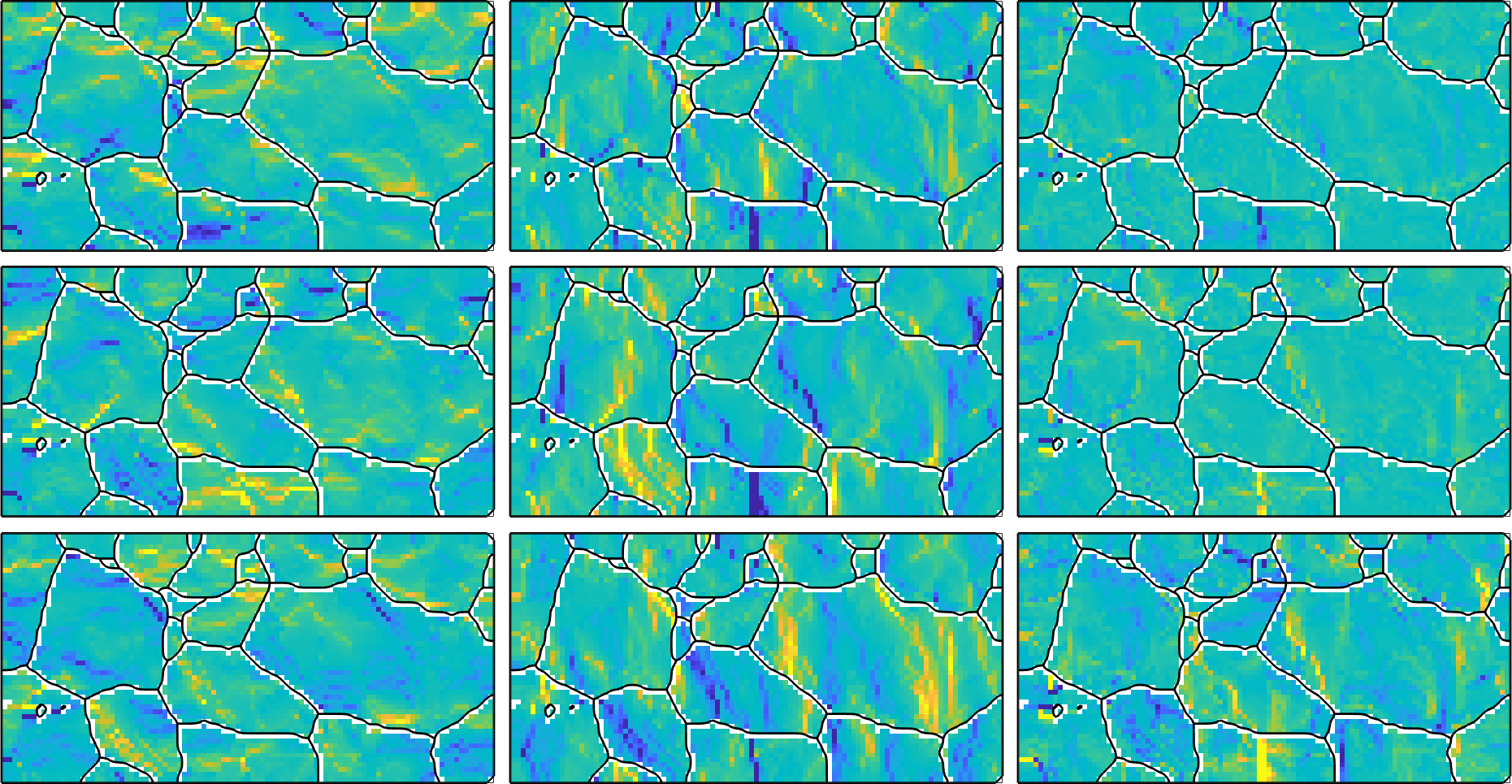
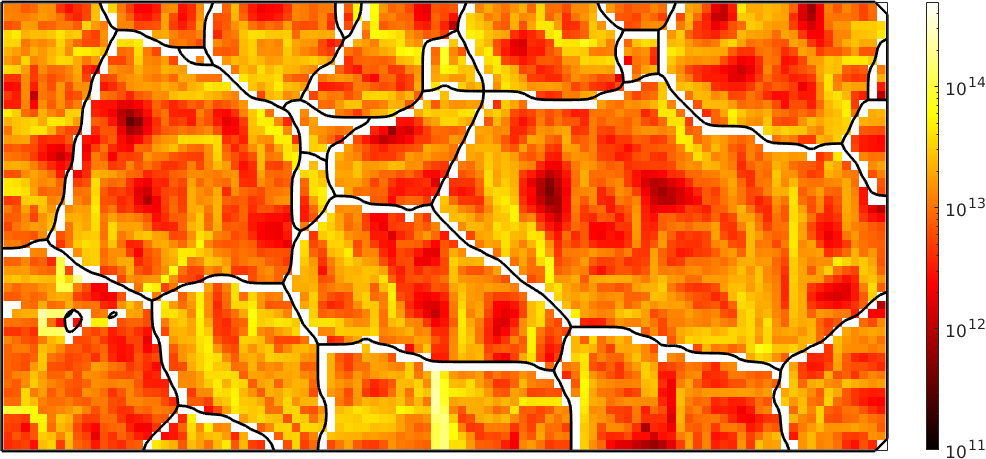
The total dislocation energy
The unit of the densities h in our example is 1/um * 1/au where 1/um comes from the unit of the curvature tensor an 1/au from the unit of the Burgers vector. In order to transform h to SI units, i.e., 1/m^2 we have to multiply it with 10^16. This is exactly the values returned as the second output factor by the function fitDislocationSystems.
factorfactor =
1.0000e+16Multiplying the densities rho with this factor and the individual energies of the the dislocation systems we end up with the total dislocation energy. Lets plot this at a logarithmic scale
close all
plot(ebsd,factor*sum(abs(rho .* dSRot.u),2),'micronbar','off')
mtexColorMap('hot')
mtexColorbar
set(gca,'ColorScale','log'); % this works only starting with Matlab 2018a
set(gca,'CLim',[1e11 5e14]);
hold on
plot(grains.boundary,'linewidth',2)
hold off